Projects
A few of my favorite things I have worked on recently. Mostly an archive, see my twitter for more real-time updates.
I'm Thomas Godden, a hardware engineer with profesional and academic experience in most of the full-stack of robotics. I currently do a little bit of everything at Physical Intelligence in San Francisco. I studied Design Engineering at Imperial College London with a masters project on learning for bipedal robot locomotion.
I like to work on complex, high power and/or moonshot problems, particularly ones involving autonomous systems with interesting planning, dynamics and control aspects.
Scroll down to see some of my projects, or jump straight to my contact info.
A few of my favorite things I have worked on recently. Mostly an archive, see my twitter for more real-time updates.
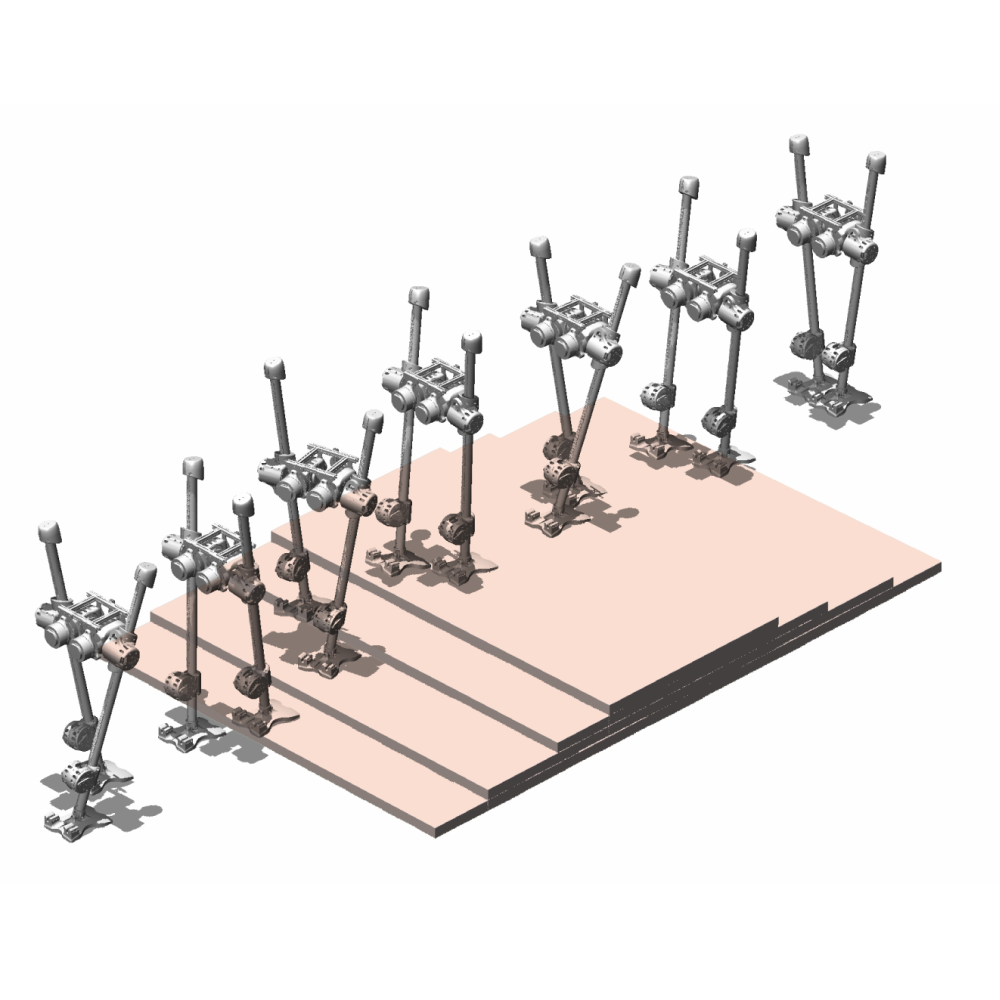
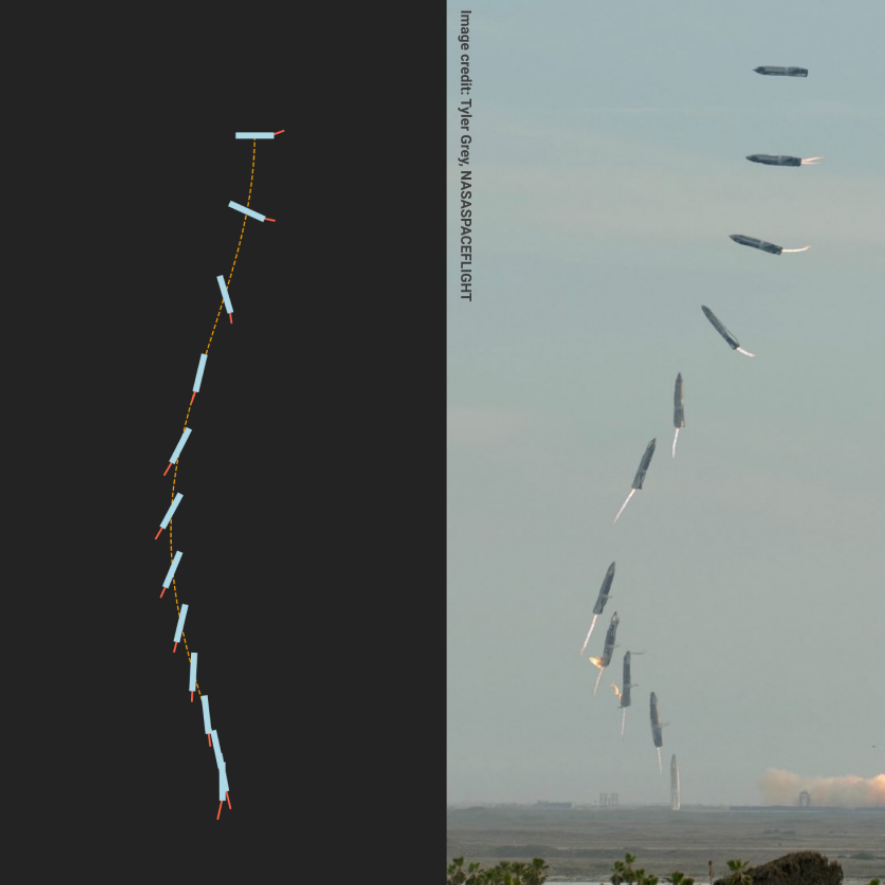
(RRT Path Planning)