(back)
50x50 Drive
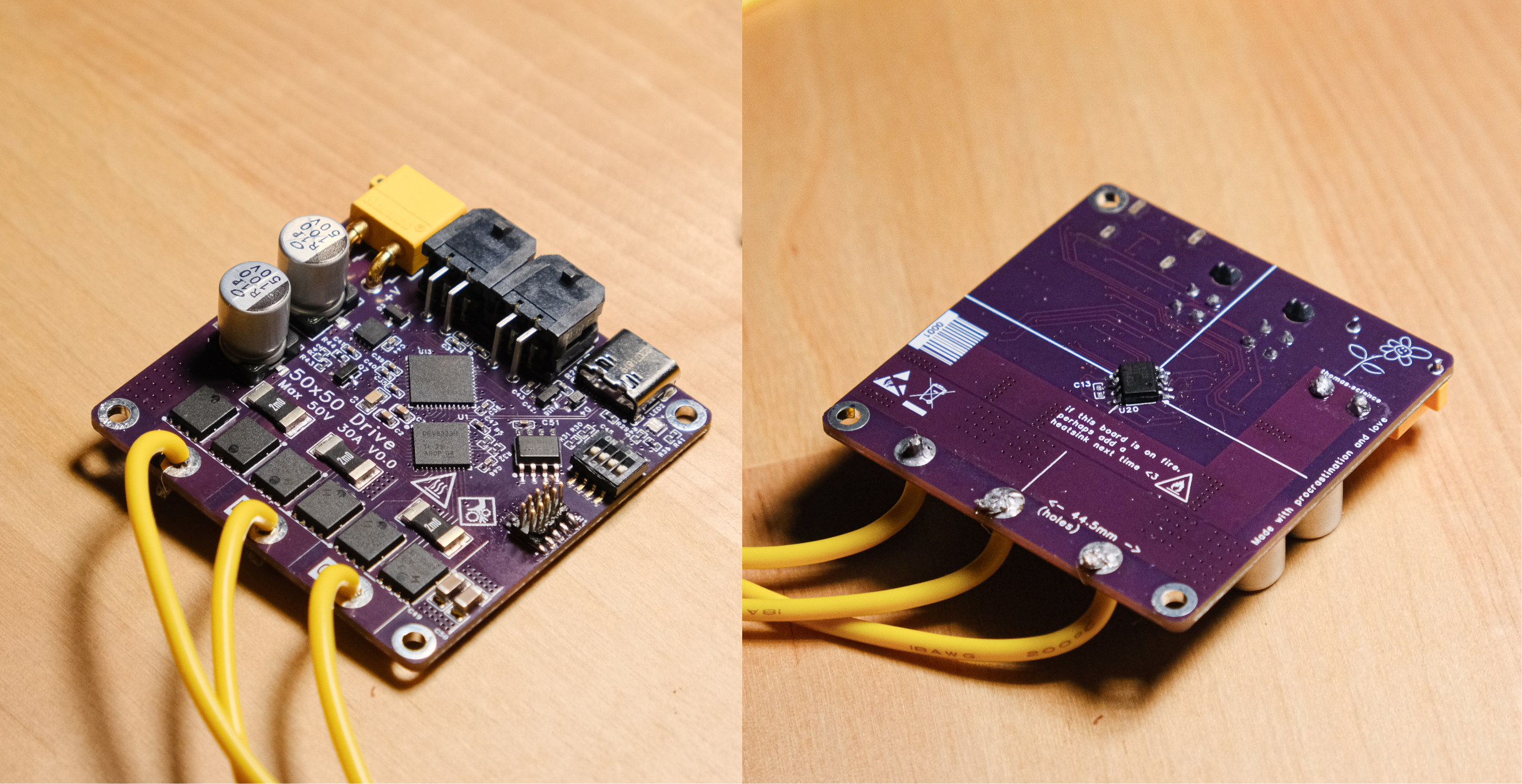
Front and back of the V0.0 Hardware
The 50x50 Drive is my custom low-cost BLDC driver. I felt that paying $100+ per axis for my own hobby robots was way too much, given that the actual hardware involved can be fairly inexpensive if picked carefully. In bulk (10+), the cost of this driver approaches $15, which is almost an order of magnitude cheaper than COTS alternatives. Both firmware and hardware development are ongoing, but they have reached a good enough to be useful state. I have a current-based FOC loop, cascaded PV controller and a CAN interface implementing parameters, actions, and telemetry.
One of the unique points about this driver is that it simultaneously functions as an SLCAN over USB interface, so an external CAN adaptor is not required. Additionally all parameter messages and firmware upgrades are implemented in CAN so can be accessed and updated from any point in the network. This mixes two of my favorite features from the leading COTS controllers; parameter updates on connected CAN devices from VESC and webserial capable setup + DFU from ODrive. See 50x50-drive.readthedocs.io for more hardware details and github.com/LegoYoda112/BLDC_Driver for firmware.
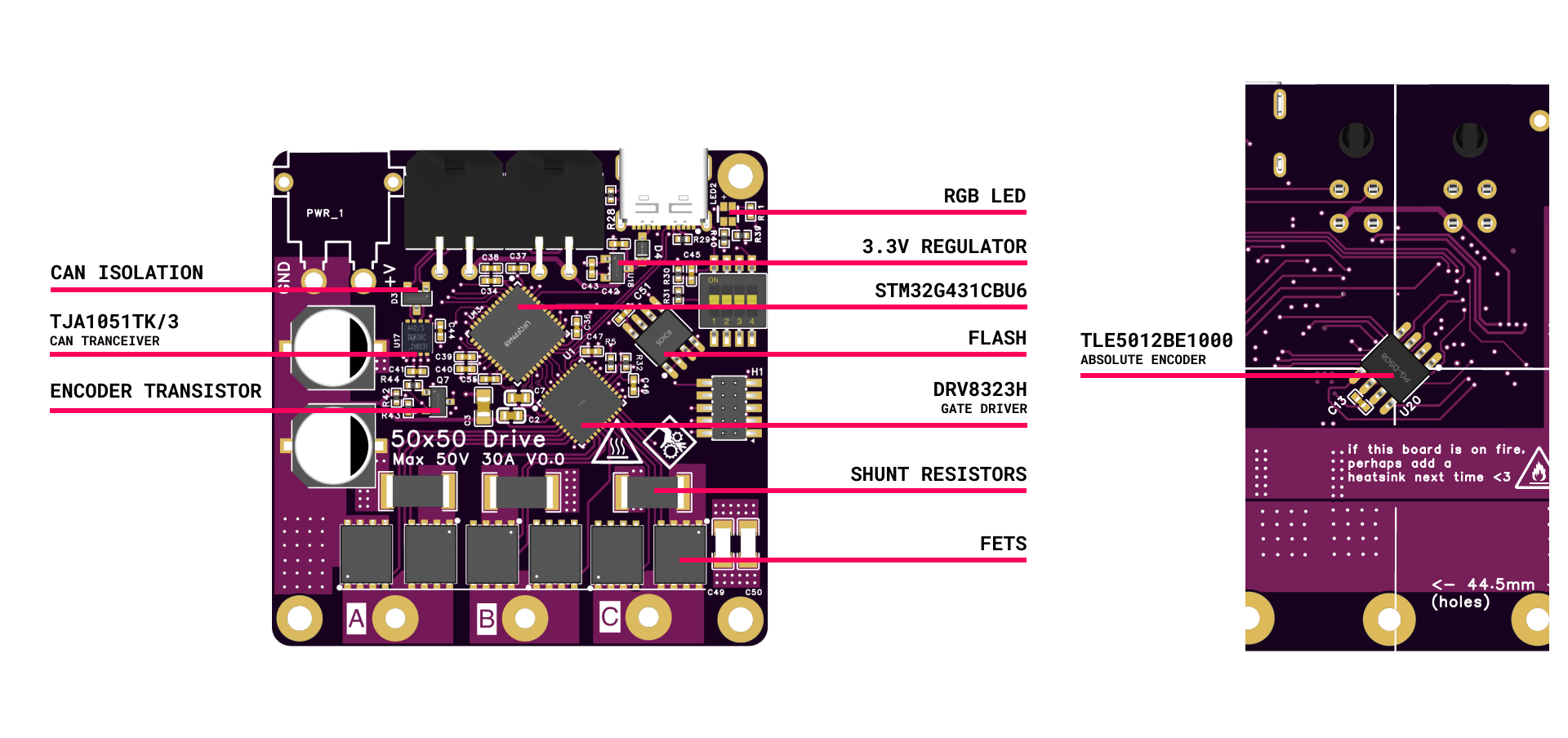
V0.0 Components
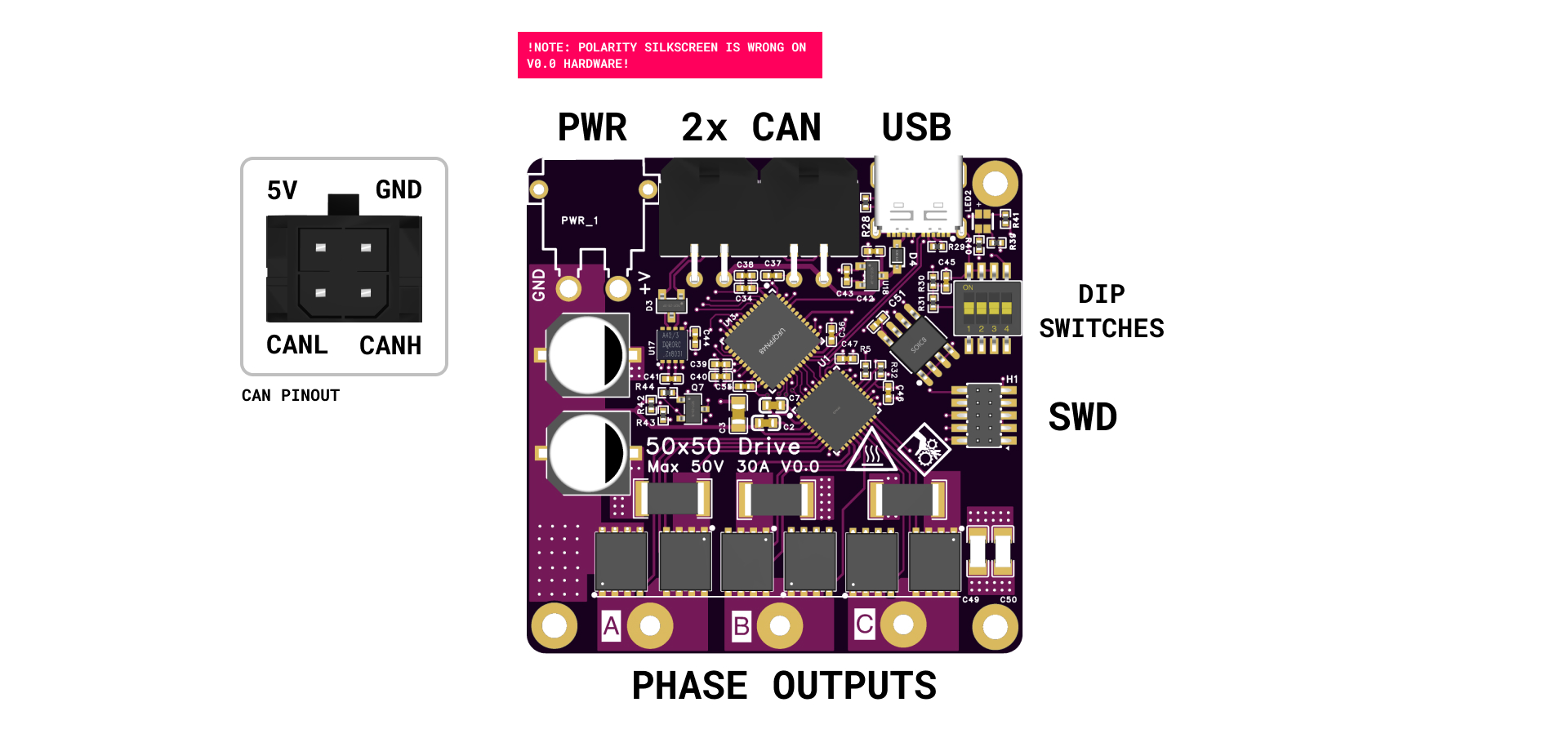
V0.0 Connectors