(back)
3D Printed SCARA Arm
// Design
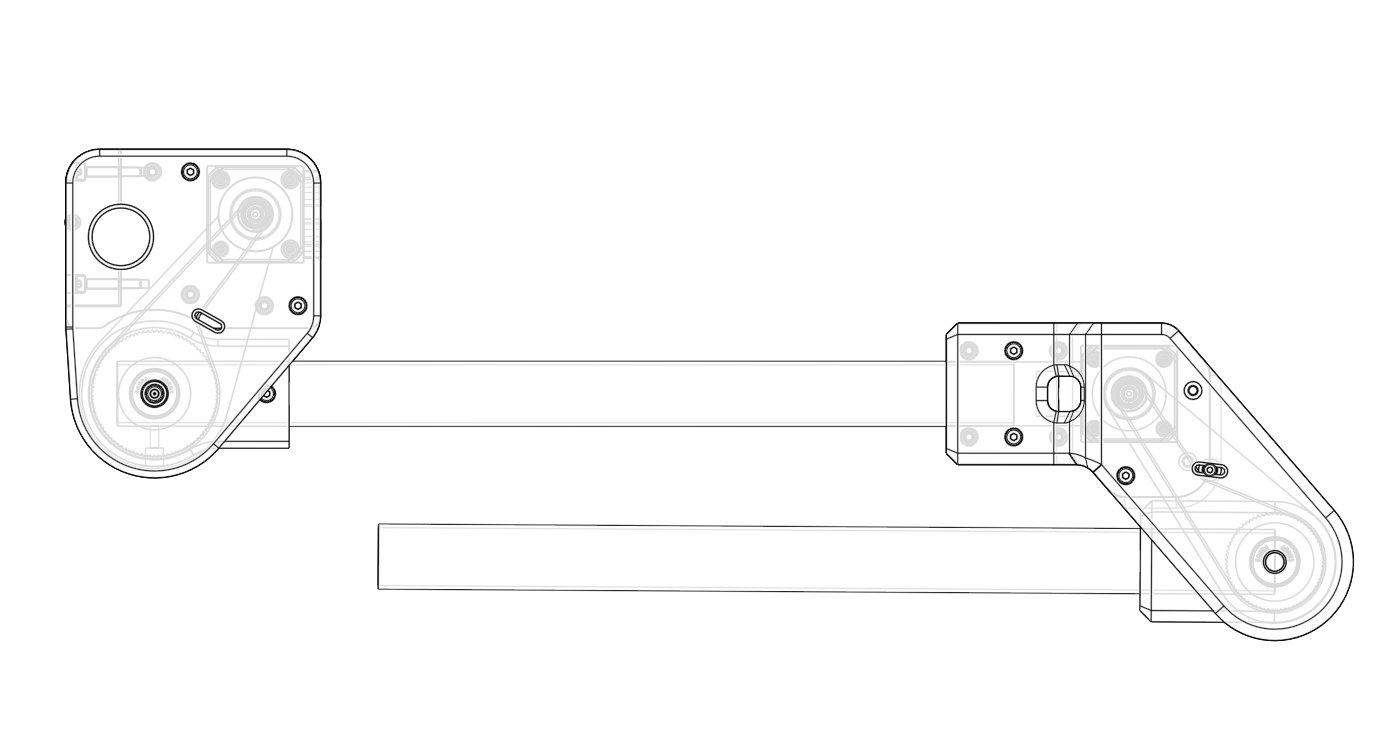
As a project to "break-in" a new CAD software I was trying out (onshape), I decided to finally build myself a robot arm. For simplicity and to lower power requirements, I decided to design a SCARA, "RR" style robot. This utilized very cheap parts that I already had lying around: skateboard bearings, steel tubes (from a curtain rod), NEMA 17 motors and GT2 timing belt. Another interesting design constraint was that it needed to be able to be packed into a suitcase, as I was moving back to the UK at the end of the summer.
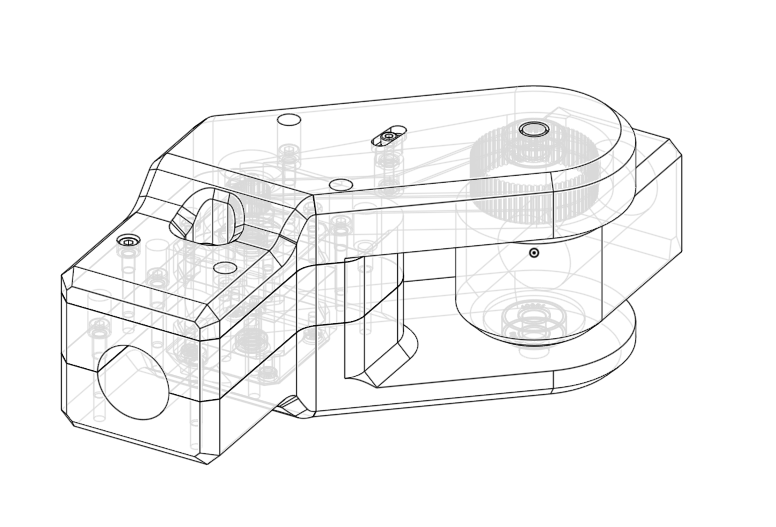
I attempted to make the design very integrated: heavily utilizing onshape's multibody parts. I am quite happy with the results, the outside looks deceptively simple.
// Hardware
After many hours of printing, and a few sizing tweaks, I had a full arm built!

// Software
I wrote up a very quick arduino sketch to run the stepper drivers and python class to interface with the arm through serial and run the IK. I could then command the arm to locations and angles in python scripts.
// Next Steps
There are two big next steps on this project that I will get around too when I have more time: Design a proper PCB so I can run the motors at the full 2 amps the drivers support, and hook up a rapsberry pi running ROS and MoveIt! to get a proper trajectory planning system.
After that, I need to make out some fun attachments to put on the end. A gripper + USB webcam for manipulation experiments might be the first.
I am also very tempted to redesign the motor pods to support BLDC motors.