(back)
LeoHack Satellite Simulator Robots
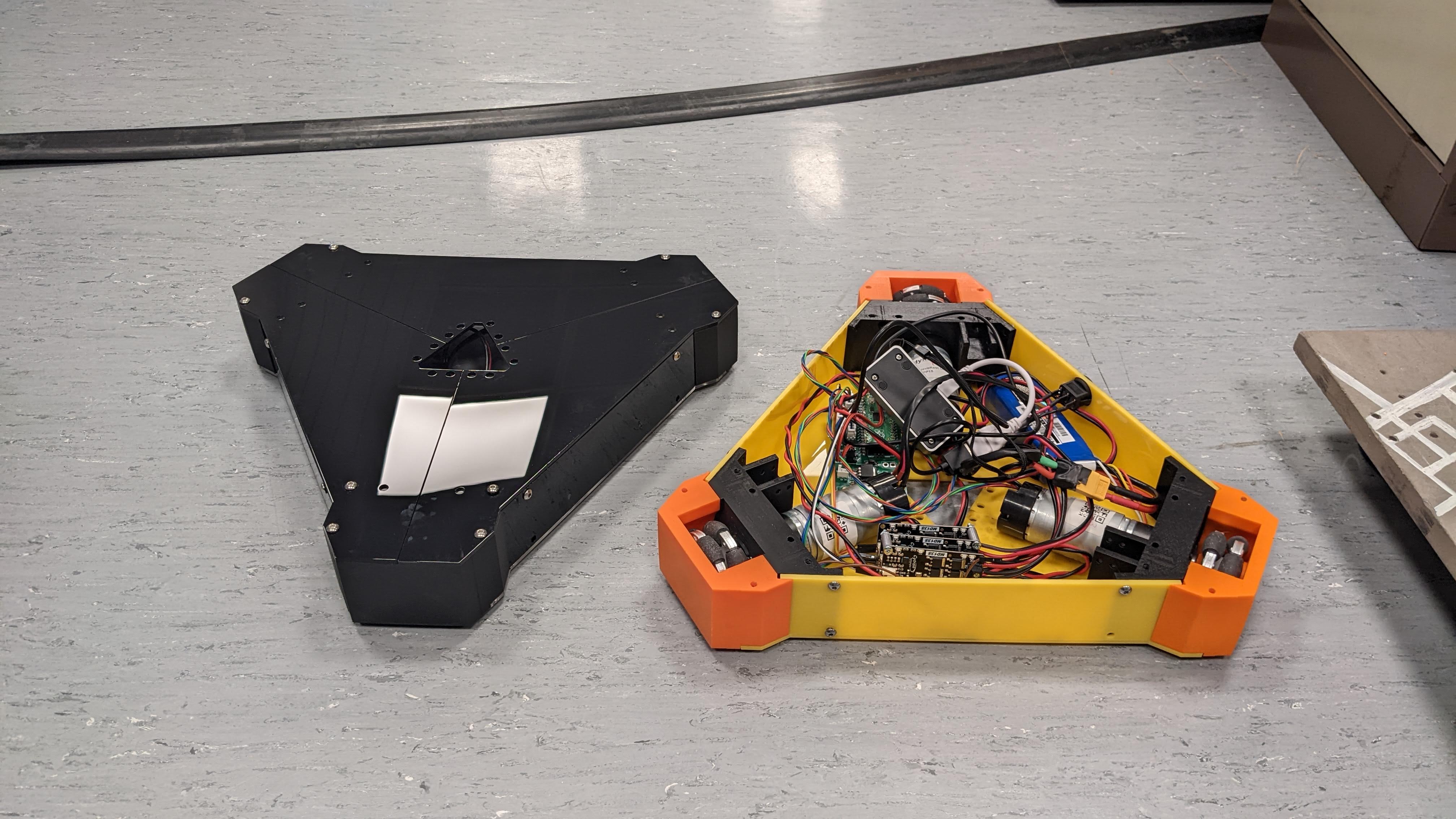
Finished robot and un-capped test bot
As part of a hardware hackathon I helped organize jointly with the Robotics and Space Societies at Imperial, I designed built a couple 3dof satellite simulators. These were designed to allow teams to design and mount docking adaptors as well as write a basic docking routine. There were some suprisingly clever solutions that came out of the hackathon, my favorite being a DIY electromagnet powered by a 9V.
A recap video I produced showing the sims in use
The robots themselves were 3-wheel omni holonomic drivebases with low level control being performed on a rpi-pico and high level comms being run by a normal rpi. Satellite state was tracked using april tags on the sides. This was the first time I had to build multible of the same robot, so was a fun experience in having to deal with the consequences of design mistakes at "scale" (very small scale admittedly).
Early test of world centric driving (decoupled rotation and translation)