(back)
Half Scale Handle
Playlist of in-progress videos
Over a holiday weekend in 2023, I caught the multi-link robot bug again and had the idea to build a half-scale version of Boston Dynamics' Handle robot. I had been looking for something more interesting to do with my custom actuators than just an arm or a robot dog (seems like everyone is building their own these days). Handle has long been my favorite robot for a couple reasons and the wheeled-legged nature of it's design means the controls are fairly reasonable. The half-scale was chosen as it should be tall enough to pick things off standard table heights. The superficial goal for this project is to do a shot-by-shot remake of the original BD video.
// Arm development

Arm and suction gripper CAD
My first hardware goal is building the arm, as it is a mostly self-contained project. It will be missing the wrist roll joint initially as I don't anticipate needing it for any of the tasks I am going to throw at it. I have completed the the shoulder, elbow and wrist joints and have run a very basic pick test to verify the suction gripper has enough force to pick up a "reasonable" object (a plastic box of T-slot nuts in this case).
First pick attempt with small suction gripper
Slow sine position goals on arm
// Perception
Alongside the hardware and controls for this project, I want to write some basic manipulation software to allow it to semi-autonomously pick and stack boxes. I am starting out by training a cardboard box segmentation network with the goal of generating suction gripper targets. The network is currently a Mask-RCNN network fine-tuned using synthetic data generated in Blender. I am using an OAK-D Lite for depth sensing, but am tempted to get one of the OAK cameras with an active IR projector.
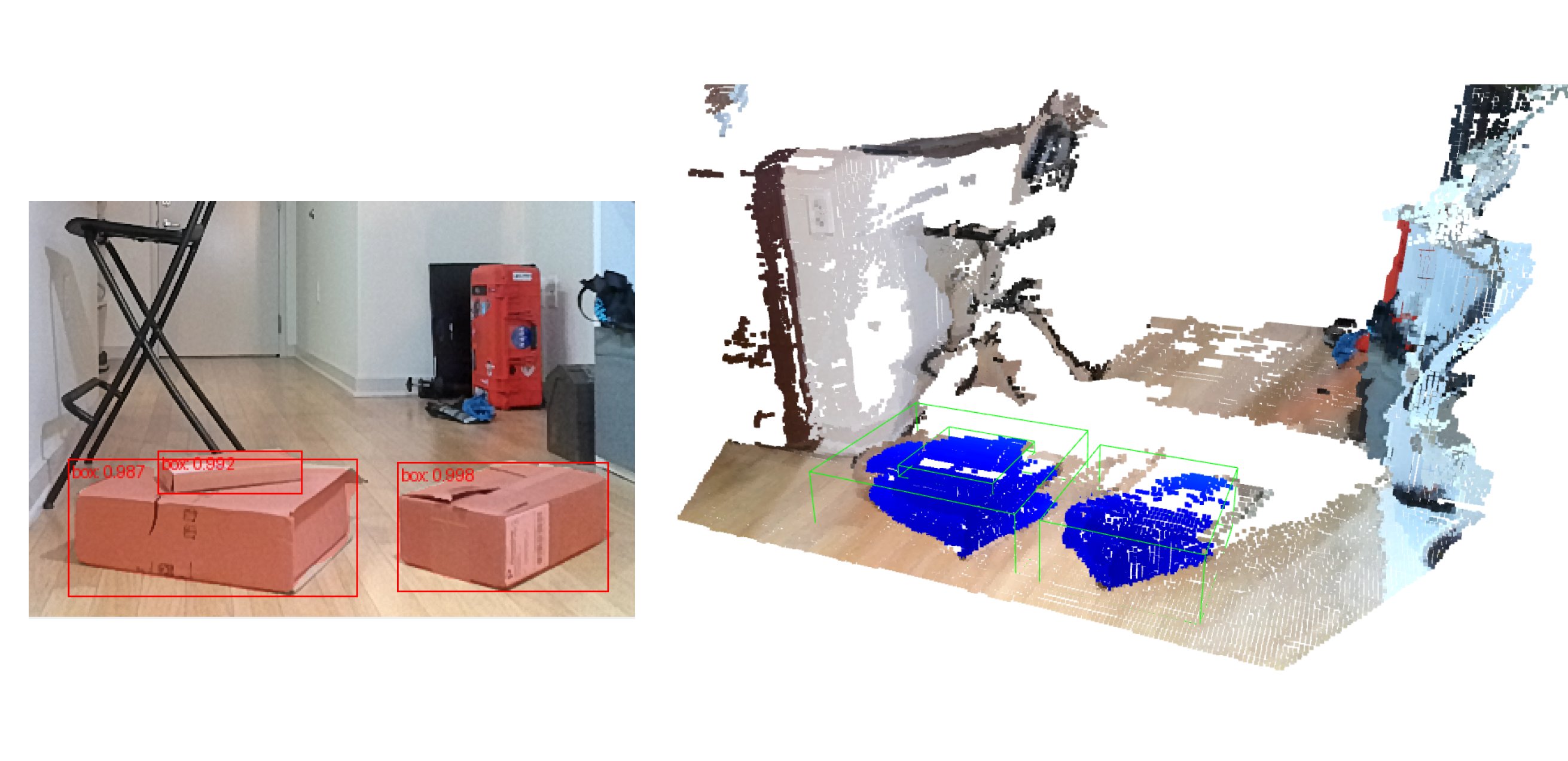
Cardboard box point-cloud segmentation